Robot Soccer Project
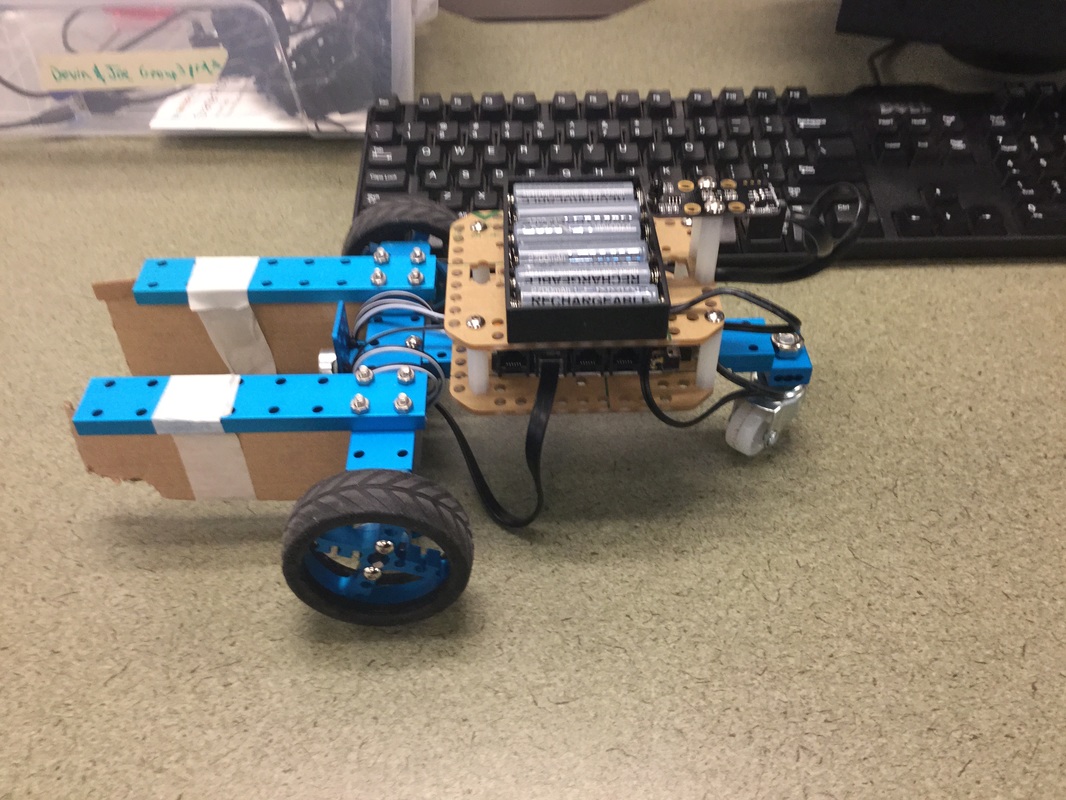
For this Project, we (my friend Joe and I) designed, built and programmed a robot to compete in our class's Robot Soccer Competition. We decided on a simple design using to prongs forward of the robot's "eyes" to catch, hold, and bat the ball.
The Competition composed of three sections, the Autonomous section in which we had to fullfill a series of goals to:
1. Have the Robot drive forward 2ft. and turn 360 degrees.
2. Push the ball into the goal
3. Turn to face the ball and push it into the goal
Unfortunately, though we easily completed 1 and 2, we were unable to complete goal 3 do to time constraints.
The Competition composed of three sections, the Autonomous section in which we had to fullfill a series of goals to:
1. Have the Robot drive forward 2ft. and turn 360 degrees.
2. Push the ball into the goal
3. Turn to face the ball and push it into the goal
Unfortunately, though we easily completed 1 and 2, we were unable to complete goal 3 do to time constraints.
|
|
|
The Second Part of this Project was to have the robot compete in against the rest of our class. This began with a skills competition, in which we were challenged to get as many balls into the goal within a given amount of time as we could. For this part of the project we used a code provided by our Teacher Mr. Kaiser
The Final Part of this project was the big tournament against our classmates, and videos of each of our matches can be found below, as can the full rules document for the tournament.
| officialrobotsoccerrules.docx |
